4.2.2.4. Задание ориентации
Каждый стержневой конечный элемент имеет локальную систему координат. Локальная ось X всегда
направлена вдоль оси стержня, а оси Y и Z направлены вдоль главных осей тензора инерции.
Оси X, Y и Z образуют правостороннюю систему координат. При прикреплении
стержневых конечных элементов их ориентация устанавливается автоматически (по умолчанию).
Для систем типа Плоская ферма и Плоская рама локальная ось Y стержня всегда
располагается в глобальной плоскости XZ.
Для систем типа Балочная клетка локальная ось Z стержня всегда совмещается с глобальной
осью Z.
Для пространственных систем если стержень не параллелен глобальной оси Z, для того чтобы
установить его ориентацию по умолчанию, надо провести через стержень плоскость, перпендикулярную
плоскости XOY глобальной системы координат. Стержень ориентируется таким образом, чтобы его
локальная ось Y лежала в этой плоскости и составляла с глобальной осью Z острый угол.
Для стержней параллельных глобальной оси Z локальная ось Y совмещается с глобальной
осью Y.
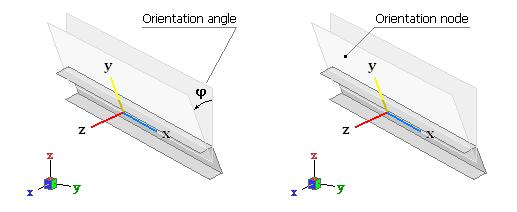
Ориентацию стержня, отличную от установленной по умолчанию, можно изменить двумя способами. Во-первых,
заданием угла ориентации и, во-вторых, заданием узла ориентации. Для того чтобы установить ориентацию
стержневого конечного элемента, введем понятие ориентирующей плоскости. Ориентирующая плоскость
- это плоскость, проходящая через ось стержня, в которой лежит локальная ось Y стержня. Для стержня,
ориентация которого установлена по умолчанию, ориентирующая плоскость всегда перпендикулярна глобальной
плоскости XOY. Угол ориентации – это угол между ориентирующей плоскостью стержня, ориентация
которого установлена по умолчанию и ориентирующей плоскостью стержня в требуемом состоянии. Положительное
значение угла отсчитывается в направлении вращения против часовой стрелки, если смотреть с конца вектора
Х локальной системы координат стержня (локальный вектор Х всегда направлен вдоль оси стержня).
Узел ориентации – это узел, лежащий в ориентирующей плоскости.
Для того чтобы изменить ориентацию элементов, войдите в режим ОРИЕНТАЦИЯ. На экране появится меню
Пометьте стержневые конечные элементы, ориентацию которых вы хотите изменить. Активируйте команду
Узел ориент.. Подведите локатор к узлу, через который будут проходить ориентирующие плоскости
всех помеченных элементов и кликните по левой клавише мыши. Программа выдаст запрос на подтверждение.
Кликните по клавише Да.
Если вам известен угол ориентации, воспользуйтесь командой Угол ориент.. Введите в окно появившейся
на экране панели значение угла ориентации в градусах (угол ориентации может быть как положительным, так и
отрицательным и задан с точностью до сотых долей градуса) и щелкните по кнопке OK.
Команда Инвертировать ось Х позволяет изменить направление локальной оси X на противоположное.
При этом положение локальной оси Y остается без изменений, локальная ось Z, также, как и ось
X, меняет свое направление на противоположное. Пометьте стержневые конечные элементы, ориентацию
которых вы хотите изменить. Активируйте команду Инвертировать ось Х.
Когда стержневой элемент прикрепляется к линии скелетона, программа автоматически устанавливает направление
его локальной оси X (как правило, оно совпадает с направлением, в котором рисовалась данная линия).
Это иногда приводит к ситуациям, когда стержни одного и того же сечения, лежащие на одной цепочке линий
имеют противоположную направленнось. Команда Инвертировать ось Х позволяет легко исправить такую ситуацию.
|