|
3.21. Особенности динамических расчетов.
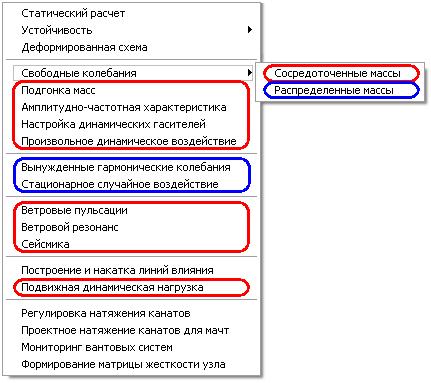
Программа выполняет динамические расчеты в двух режимах -1). в режиме сосредоточенных масс (СМ) и 2). в режиме распределенных масс (РМ). Ниже на рисунке меню красной рамкой обведены расчеты, выполняемые в режиме сосредоточенных масс, синей - распределенных масс.
Расчеты, выполняемые в режиме сосредоточенных масс, требуют предварительного приведения распределенной массы конструкции к определенным узлам. В этом случае ваша задача состоит в том, чтобы указать программе те узлы, к которым будет приводиться масса конструкции. Когда вы присоединяете массы к каким-то узлам, для программы это сигнал сгонять массу элементов конструкции к этим узлам. Поэтому, в большинстве случаев, присоединяя такие массы вам задавать их значения вообще не надо – программа вычислит их сама. Значение массы надо задавать только в том случае, если к данному узлу прикреплено какое-то оборудование, например, моторы. Вот в этом случае надо задать массу такого мотора. Программа сгонит массы элементов конструкции к такому узлу и добавит еще массу этого мотора. Таким образом, главная ваша задача состоит в выборе узлов, к которым будут прицеплены массы. Узлы вы должны выбирать так, чтобы они равномерно покрывали вашу конструкцию. Чем больше вы зададите таких узлов, тем точнее будут посчитаны собственные частоты. Но злоупотреблять тоже не надо. Например, для обычной башни достаточно разместить массы в 4-5 ярусах, равномерно раздвинув их по высоте. Если есть какие-то консоли, отходящие от башни, дайте на их концах тоже массы, иначе вы не увидите, как они болтаются.
Расчеты, выполняемые в режиме распределенных масс, не требуют предварительного приведения распределенной массы конструкции к узлам, но сосредоточенные массы также могут быть включены в расчетную схему. Эти расчеты используют точное решение для стержневых элементов. В отличие от задач с сосредоточенными массами, системы с распределенными массами имеют бесконечный спектр собственных частот (напомним, что число собственных частот в задачах с сосредоточенными массами равно числу динамических степеней свободы, т.е. числу степеней свободы заданных масс). Поэтому, например, при поиске собственных частот в режиме распределенных масс надо задавать интервал частот, внутри которого программа будет отыскивать собственные частоты. Как правило, пользователю заранее неизвестен порядок (примерное значение) собственных частот. Поэтому можно поступить следующим образом - введите в конструкцию несколько фиктивных (нулевых) масс и пропустите этот расчет сначала в режиме СМ. В результате вам станет известен порядок собственных частот. На основе этих данных определитесь с интервалом частот и пропустите расчет в режиме РМ. Преимущество режима РМ состоит в том, что вы можете определить все собственные частоты с любой наперед заданной точностью. В то время, как точность значений собственных частот в режиме СМ зависит от количества заданных масс и вашего мастерства в плане распределения их по телу конструкции. Этот нюанс, кстати, можно использовать для того, чтобы оценить – насколько вы хорошо задали точки приведения масс, если ваш главный расчет можно выполнить только в режиме СМ.
Еще одно важное достоинство расчетов в режиме распределенных масс состоит в том, что они позволяют учесть частотно независимое сухое трение (поглощение энергии) в элементах конструкции. Поведение большинства материалов, с которыми приходится работать строителям, как-раз соответствуют именно такой схеме работы – энергия, рассеянная за один цикл колебаний, не зависит от частоты возмущения. В этом плане расчетам в режиме СМ не повезло, здесь все наоборот – трение может быть только вязкое, зависимое от частоты и, как правило, учитывается задаваемым на всю конструкцию единым декрементом затухания. В расчетах же в режиме РМ, мало того, что трение сухое, оно еще и можно задать различным для различных элементов конструкции. Мы приведем с одной стороны простой, но с другой, очень нетривиальный пример. Пусть нам надо подавить вибрации антенны корабля. Для простоты будем считать, что антенна – это стальная труба D48x3.2 (рис. a).
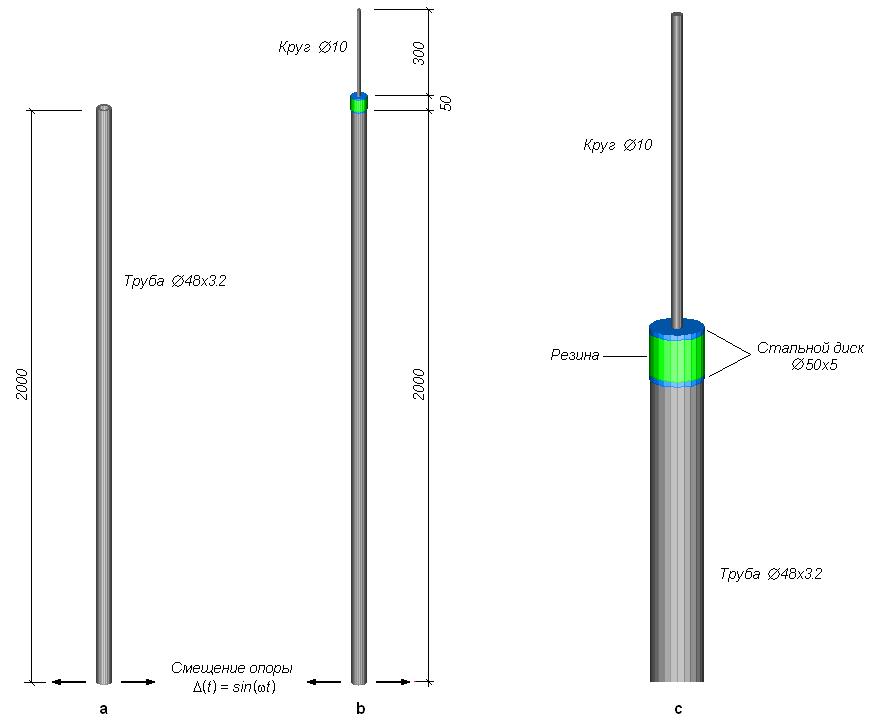
Расчет в режиме РМ дал значение нижней собственной частоты для консольно защемленного стержня - w1=72.2 рад/сек. Примем коэффициент внутреннего неупругого сопротивления для материала трубы g=0.0159 (для стальных конструкций в режиме резонанса рекомендуется принимать логарифмический декремент затухания d=0.05, а g=d/p. Расчет на вынужденные колебания (гармоническое смещение опоры с амплитудой 1мм) с частотой w=72.2 рад/сек дал абсолютное перемещение верхней точки 98.5мм. Прицепим к концу стержня громоотвод, состоящий из двух стальных дисков D50x5, собственно громоотвода – прут D10 и цилиндрического столбика резины диаметром 50мм с характеристиками E=6.08 106Н/м2, r=980.7 кг/м3, g=0.2. Резиновый столбик и прут моделируются обычными стержнями (рис. b и c). Повторный расчет на вынужденные колебания дал перемещение той же точки 1.31мм. Не правда ли, потрясающий эффект - 1.31 против 98.5! Мы, конечно, дали не случайные значения параметрам резины и прута громоотвода – вы сможете самостоятельно подбирать такие параметры, если прочтете раздел 3.7. Настройка гасителей колебаний. Но принципиально то, что это расчет стал возможен только потому, что у нас появилась возможность назначать разные значения коэффициента неупругого сопротивления для разных элементов.
|